May
Impresión 3D
Piel impresa en 3D para mejorar manos robóticas
La piel impresa en 3D está revolucionando el mundo de la robótica, especialmente en el desarrollo de manos robóticas más hábiles y sensibles. Investigadores de ETH Zurich y la Universidad Tecnológica de Nanyang han logrado avances significativos en este campo, creando una piel suave sensorada que imita la destreza y la capacidad de percepción táctil de las manos humanas. Este artículo explora los detalles de esta innovadora tecnología y sus implicaciones para el futuro de la robótica.

Innovación en Piel Impresa y Sensores Táctiles
La piel impresa en 3D está diseñada para superar las limitaciones de las pinzas robóticas tradicionales, que carecen de la complejidad estructural y la suavidad necesarias para manipular objetos delicados.
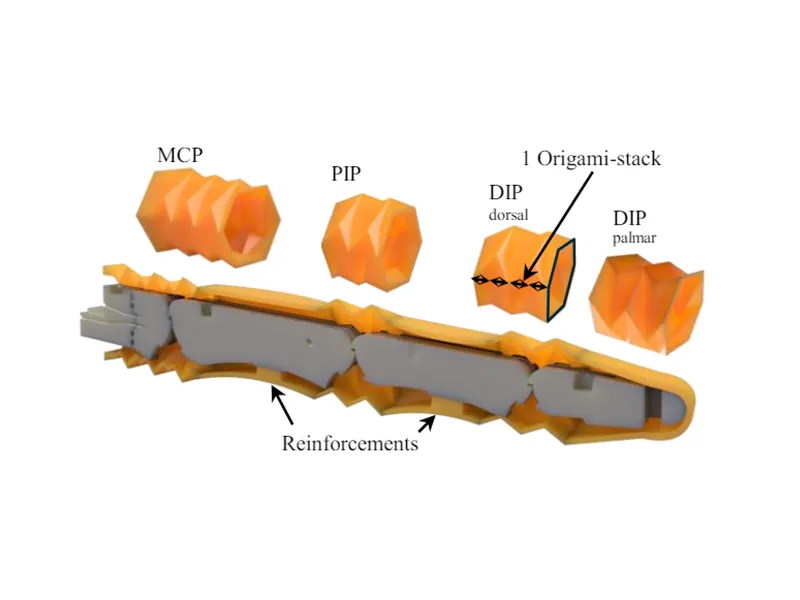
Utilizando técnicas avanzadas como la impresión 3D con materiales múltiples y diseños inspirados en el origami, los investigadores han podido crear geometrías de piel flexibles y duraderas.
El proceso de desarrollo implica varios pasos meticulosos. Primero, se diseñan las geometrías complejas que permitirán a la piel mantener su flexibilidad y durabilidad. Luego, estas geometrías se imprimen en 3D utilizando múltiples materiales que simulan la elasticidad y la resistencia de la piel humana. Finalmente, la piel impresa se moldea en silicona para proporcionar una cobertura suave y robusta para las manos robóticas.
Una característica clave de esta piel impresa es la integración de sensores de presión piezoresistivos. Estos sensores se colocan estratégicamente en áreas clave de contacto de la mano robótica. De esta manera, la piel puede detectar y evaluar la fuerza de agarre, proporcionando una retroalimentación sensorial similar a la propriocepción humana. Este avance permite que las manos robóticas interactúen de manera más efectiva con su entorno, ajustando su agarre en tiempo real según las necesidades del objeto manipulado.

Aplicaciones y Beneficios de la Piel Impresa en la Robótica
La implementación de piel impresa en manos robóticas abre un mundo de posibilidades en diversas industrias. En la manufactura, estas manos robóticas pueden manejar componentes delicados y ensamblar piezas con una precisión que antes era imposible. En la atención médica, los robots equipados con piel impresa pueden realizar tareas complejas y delicadas, como la cirugía asistida por robots o el cuidado de pacientes.
Las pruebas realizadas por los investigadores han demostrado mejoras significativas en el rango de movimiento y la fuerza de agarre de las manos robóticas equipadas con piel impresa. Estas manos no solo pueden sujetar objetos con mayor precisión, sino que también pueden adaptarse a diferentes formas y texturas, aumentando su versatilidad y funcionalidad.
Además, la piel impresa contribuye a una interacción más segura y efectiva entre humanos y robots. En entornos de colaboración, como líneas de ensamblaje o centros de salud, es crucial que los robots sean capaces de manipular objetos sin causar daño. La piel impresa con sensores táctiles garantiza que los robots puedan ajustar su fuerza y movimiento de manera adecuada, minimizando el riesgo de accidentes y mejorando la eficiencia operativa.
Conclusión
La piel impresa en 3D representa un avance monumental en la mejora de las manos robóticas, equipándolas con habilidades de percepción y manipulación que se asemejan a las de las manos humanas.
A través de la integración de sensores táctiles avanzados y el uso de técnicas de impresión 3D innovadoras, los investigadores han logrado crear una solución que mejora significativamente la destreza y la sensibilidad de las manos robóticas.
Esta tecnología no solo promete revolucionar la robótica industrial y médica, sino que también abre nuevas posibilidades para la colaboración segura y eficiente entre humanos y robots. Con el desarrollo continuo de la piel impresa, el futuro de la robótica se vislumbra más brillante y prometedor, marcando el comienzo de una nueva era de interacciones humano-robot.


Resinas

Formlabs

Formlabs




Creality

Formlabs

Formlabs

Formlabs
Gracias por leernos!!
